IV.Occupancy与Scheduling
前置知识
这一个版面主要回答的问题是 一个kernel的多个block是怎么在SM内和SM间怎么调度的;限制一个SM上同时执行多少个block的因素是哪三个?
总流程
我觉得我还需要知道triton整体的这个发射到调度的流程是怎么样的,先前有一些把triton和cuda搞混了。 我目前的理解是:
- launch一个kernel,使用
_matmul_kernel[grid](...)启动一个grid,其中grid是
grid = lambda meta: (triton.cdiv(m, meta["BLOCK_SIZE_M"]) * triton.cdiv(n, meta["BLOCK_SIZE_N"]),)- 这个grid实际代表的是很多个block合起来,grid对应的硬件是gpu,所以意思是这一句launch会在我们的一个gpu上执行,然后启动
M*N这个形状个BLOCK(program) - BLOCK对应的硬件是SM,triton其实就是一个program进行计算,然后kernel内部使用pid来代表最小的执行单元thread. 所以pid是对应thread的进程号,然后这里pid是一个全局的编号,可以通过pid来判断当前的program负责整体矩阵计算的哪一块。
- 实际调度是根据program来的,也就是pid代表的一个program会被调度到一个SM中驻留执行。真正被调度到 SM 上的是CUDA thread block也就是Triton program
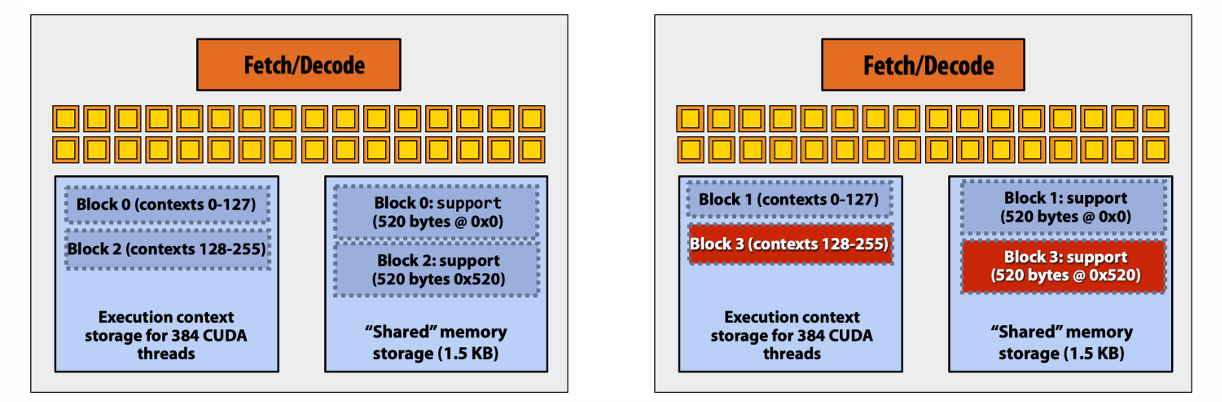
- 一个SM实际上可以容纳多个BLOCK同时驻留(resident),一般发生在SM数量少于发射的BLOCK数量的情况下。SM中的每个 block 都会申请自己的一份 shared memory,会根据数据是否准备好进行调度.
- triton上的一个 pid 就对应一个 Triton block/program,一个program负责计算的是一个
BLOCK_M*BLOCK_N的大小,也就是上文提到的一个BLOCK的计算范围。
Block调度
一个SM可以容纳多个Block在其中驻留,然后SM内部根据warp为单位进行调度执行。一个SM中有多个warp可以轮换切着占用core。
限制的因素主要应该是:
- shared memory(共享内存)
- thread context(线程上下文)
- register file(寄存器文件)
- block size(块大小)
线程上下文存在硬件维护的register file + warp state hardware中,包括pc、寄存器、执行状态等,用于恢复上下文
shared memory是block 内通信,tile中cache等,不能block之间共享的信息。
SM 的寄存器总量是固定的,GPU 的 warp 切换不做寄存器swap,而是所有 resident warp 的寄存器状态一直保存在 SM 里,所以寄存器也是限制因素
GPU 真正调度的单位是warp而不是block,如果block切得太碎,使得block达到上限而warp数没有达到依然会造成浪费。
在 triton 里,warp 数是对应 program 的,编译器根据 num_warps 参数生成的。
_matmul_kernel[grid](
...,
BLOCK_SIZE_M=128,
BLOCK_SIZE_N=128,
num_warps=8,
)除了 grid 中指定,num_warps 来源还可以是 autotune 的 config,也可能是在 kernel launch 时显式传入。
为什么算子1的SM利用率低,算子1和算子3怎么共同运行
因为kernel单独launch一次,Triton/CUDA GEMM 通常按输出矩阵切 tile,算子1的低秩矩阵能够分块的tile不多,导致单次launch后空闲的SM太多。 算子1和算子3之间没有依赖。算子3不会占满所有资源。
occupancy
- 正式定义
例如在 A100(Compute Capability 8.0)上:
- 每个 SM 最大支持 64 个 Warp(2048 个线程)
- 如果你的 Kernel 由于资源限制只能在每个 SM 上运行 32 个 Warp
- 那么 Occupancy = 32/64 = 50%
Occupancy 的核心价值在于延迟隐藏(Latency Hiding)。GPU 的执行模型依赖 Warp 切换来掩盖内存访问延迟:
时间线:
Warp 0: [计算] [等待内存...400cycles...] [计算]
Warp 1: [计算] [等待内存...400cycles...] [计算]
Warp 2: [计算] [等待内存...400cycles...]
...
如果活跃 Warp 足够多,调度器总能找到就绪的 Warp 来填充等待期wave
第1个wave就是前Sm数量乘x每个sm最大驻留的block数wave = 一批同时 resident 的 blocks。 比如一个GPU有80 SM,每个SM可驻留4个Block.那么first wave就是320BLOCK 等第1 wave有 block 结束,再补上后面的 很多 GPU(尤其 NVIDIA) 第1 wave通常会近似 round-robin。
block0 -> SM0
block1 -> SM1...虽然官方不保证但实际经常这样。所以很多人利用这个“经验规律”做
if (blockIdx.x < 40)
taskA();
else
taskB();试图taskA 用前40个SM,taskB 用后40个SM。 不过后续的waves可能就会打破这个规律。这时有一个做法是persistent kernel可以强制做这种复用
示例
启动 NumBlocks ≈ NumSMs,例如 108 个 persistent blocks
每个 block 根据自己的 block_id 被分到两个 worker pool:
Pool 0: main workers,负责 W = X @ C 的 896 个 tile Pool 1: lora-down workers,负责 Y = X @ A 的 4 个 tile
每个 worker 在 kernel 内部循环取 tile:
while true:
tile_id = atomic_add(global_counter, 1)
if tile_id >= total_tiles: break
compute tile更好的设计是“两阶段 worker”:
if block_id < num_down_workers:
先处理 down tiles: Y = X @ A
down tiles 做完后,转去处理 main tiles: W = X @ C
else:
直接处理 main tiles: W = X @ C工具
- Nsight Compute 中的 Occupancy 分析
# 关键指标
sm__warps_active.avg.pct_of_peak_sustained_active # 实际活跃 Warp 占比
launch__occupancy # 理论 Occupancy
launch__registers_per_thread # 每线程寄存器
launch__shared_mem_per_block_allocated # 每 Block 共享内存Nsight Compute 还会显示 Occupancy 的瓶颈来源:
Occupancy Limiters:
Registers: 50% ← 瓶颈
Shared Memory: 75%
Block Size: 100%
Theoretical: 50%triton版调优流程
graph TD
A["测量 Triton Kernel 性能"] --> B["用 Nsight Compute 获取 Occupancy / Registers / Shared Memory"]
B --> C{"Occupancy 是否是瓶颈?"}
C -->|"Memory-bound 且 Occupancy < 50%"| D["尝试提升 Occupancy"]
C -->|"Compute-bound 或性能已足够"| E["优化访存、tile、Tensor Core 利用率等"]
D --> F{"主要限制因素?"}
F -->|"寄存器过多"| G["减小 BLOCK_M / BLOCK_N;减少 accumulator;调整 num_warps / num_stages"]
F -->|"共享内存过多"| H["减小 BLOCK_K;减小 tile size;降低 num_stages"]
F -->|"Program 太小 / Warp 数不足"| I["增大 num_warps;调整 BLOCK_M / BLOCK_N"]
F -->|"Program 太大"| N["减小 num_warps;减小 BLOCK_M / BLOCK_N"]
G --> J["重新 benchmark + Nsight Compute 验证"]
H --> J
I --> J
N --> J
J --> K{"性能是否提升?"}
K -->|"是"| L["保留新配置"]
K -->|"否"| M["回退,接受当前 Occupancy 或转向其他瓶颈"]